載入中……
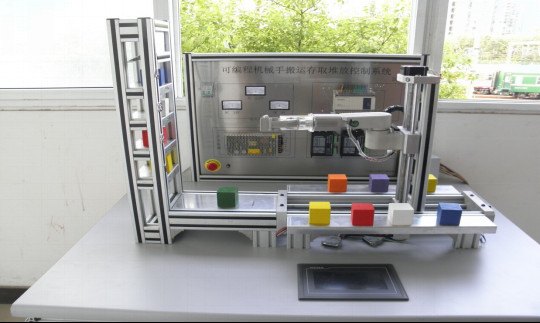
[供應]KBE-5206六自由度機器人搬運堆放系統
- 產品產地:
- 產品品牌:
- 包裝規格:
- 產品數量:0
- 計量單位:
- 產品單價:0
- 更新日期:2017-04-07 15:45:35
- 有效期至:2027-04-05
-
-
- 收藏此信息
KBE-5206六自由度機器人搬運堆放系統
詳細信息
KBE-5206六自由度機器人搬運堆放系統
一、六自由度機器人實驗內容目的
機器人的認識
實驗內容:了解機器人的機構組成和工作原理;
了解該機器人的性能指標;
觀察該機器人基本功能運行過程
機器人機械系統
實驗內容:了解機器人機械系統的組成;
了解機器人機械系統各部分的原理及作用;
掌握機器人單軸運動的方法。
機器人控制系統
實驗內容:了解該機器人控制系統的組成;
了解該機器人對各單元控制原理
了解機器人控制系統各部分的原理及作用。
機器人示教編程及再現控制
實驗內容:了解機器人示教與再現的原理;
掌握機器人示教和再現過程的操作方法。
掌握PLC編程技術和人機界面觸摸屏技術。
機器人坐標系的建立
實驗內容:了解機器人建立坐標系的意義;
了解機器人坐標系的類型;
掌握該機器人選用符合PLC要求坐標傳感器。
機器人關節運動軌跡規劃
實驗內容:理解機器人關節坐標運動的概念;
了解機器人關節坐標運動時的軌跡規劃方法;
了解基于運動控制器的機器人關節運動的梯形的規劃過程;
機器人PTP(點到點)運動軌跡控制
實驗內容:理解機器人PTP(點到點)運動的概念;
了解機器人PTP(點到點)運動的控制方法;
了解機器人實現PTP(點到點)運動的過程。
10、機器人PLC運動控制
實驗內容:理解機器人PLC運動的概念;
了解機器人PLC運動的控制方法;
11、機器人的搬運、裝配實驗
實驗內容:了解機器人完成作業的過程;
掌握機器人示教作業的方法;
了解化工行業以及其它行業生產出來的有害液體的傾注;
掌握多機器人配合工作的原理。
技術指標:
結構形式
串聯關節式
★驅動方式
步進電動混合驅動
負載能力
500g
重復定位精度
±0.1mm
★運動范圍
大手臂
小手臂
手腕
指掌
X軸
Y軸
180°
90°
360°
25-80mm
430mm
330mm
每軸最大運動速度
★大手臂
約15°/S
★小手臂
約15°/S
★手腕
約15°/S
★指掌
約15°/S
★X軸
約8mm/S
★Y軸
約8mm/S
最大直線距離
約430mm
高度
約500mm
本體重量
15Kg
操作方式
示教再現/編程
供電電源
單相220V、50Hz
機器人主要功能及要求:
1.具備實際運動控制、實物演示等功能。
2.軟件具有開放接口,提供底層函數、動態鏈接庫以及部分與二次開發有關的原代碼,機器人可通過控制系統電控柜與PC機直接連接。開放接口可以用于教師或學生對于設備功能的二次開發(含二次開發文檔、示例文檔)。
3.具備軟件的可升級功能。
4.具備計算機網絡控制和系統進一步擴展功能。
★5.機器人本體的主要關節及傳動部分在不影響機器人剛度的基礎上,采用透明式封裝,機構可視便于教學實驗。
同類型其他產品
免責聲明:所展示的信息由企業自行提供,內容的真實性、和合法性由發布企業負責,浙江民營企業網對此不承擔任何保證責任。
友情提醒:普通會員信息未經我們人工認證,為了保障您的利益,建議優先選擇浙商通會員。